الکتروموتورها
موتورهای الکتریکی(Motor / Electric motor)
موتور الکتریکی یک ماشین الکتریکی است که انرژی الکتریکی را به انرژی مکانیکی تبدیل می کند. بیشتر موتورهای الکتریکی از طریق فعل و انفعال بین میدان مغناطیسی موتور و جریان الکتریکی در سیم پیچ کار می کنند تا نیرویی را به شکل گشتاور اعمال شده روی محور موتور ایجاد کنند. موتورهای الکتریکی را می توان با منابع جریان مستقیم (DC) مانند باتری ها یا یکسو کننده ها یا منابع متناوب (AC) مانند شبکه برق ، اینورتر یا ژنراتورهای برق تغذیه کرد. یک ژنراتور الکتریکی از نظر مکانیکی مشابه یک موتور الکتریکی است ، اما با جریان معکوس قدرت کار می کند و انرژی مکانیکی را به انرژی الکتریکی تبدیل می کند.
موتورهای الکتریکی را می توان با ملاحظاتی مانند نوع منبع قدرت ، ساختار داخلی ، کاربرد و نوع خروجی حرکت طبقه بندی کرد. علاوه بر انواع AC در مقابل انواع DC ، موتورها ممکن است مسواک زده شوند یا بدون برس ، ممکن است فازهای مختلفی داشته باشند (رجوع کنید به تک فاز ، دو فاز یا سه فاز) و ممکن است هوا خنک شده یا مایع خنک شوند. موتورهای عمومی با ابعاد و ویژگی های استاندارد قدرت مکانیکی مناسب را برای مصارف صنعتی فراهم می کنند. بزرگترین موتورهای الکتریکی برای پیشرانه کشتی ، فشرده سازی خطوط لوله و برنامه های ذخیره سازی پمپاژ با قدرت ۱۰۰ مگاوات استفاده می شود.
موتورهای برقی در فن های صنعتی ، دمنده ها و پمپ ها ، ماشین آلات ، لوازم خانگی ، ابزارهای برقی و درایوهای دیسک یافت می شوند. موتورهای کوچک ممکن است در ساعت های برقی یافت شوند.
در برخی از کاربردها ، مانند ترمزهای احیا کننده با موتورهای کششی ، موتورهای الکتریکی را می توان به صورت معکوس به عنوان ژنراتور برای بازیابی انرژی استفاده کرد که در غیر این صورت ممکن است در اثر حرارت و اصطکاک از بین برود.
موتورهای الکتریکی بسیار کارآمدتر از دیگر موتورهای اصلی مورد استفاده در صنعت و حمل و نقل هستند ، موتور احتراق داخلی (ICE). موتورهای الکتریکی معمولاً بیش از ۹۵ efficient کارآمد هستند.
در حالی که ICE ها بسیار کمتر از ۵۰ هستند. آنها همچنین سبک وزن هستند ، از نظر جسمی کوچکتر هستند ، از نظر مکانیکی ساده تر و ارزان تر ساخته می شوند ، می توانند گشتاور فوری و ثابت را با هر سرعتی ایجاد کنند ، می توانند با برق تولید شده از منابع تجدیدپذیر کار کنند و کربن را به اتمسفر تخلیه نکنند. به همین دلایل موتورهای الکتریکی جایگزین احتراق داخلی در حمل و نقل و صنعت می شوند ، اگرچه در حال حاضر استفاده از آنها در خودروها به دلیل هزینه و وزن بالای باتری ها است که می تواند محدوده کافی بین شارژها را محدود کند.
موتورهای الکتریکی نیروی خطی یا چرخشی (گشتاور) ایجاد می کنند که برای حرکت برخی مکانیسم های خارجی مانند فن یا آسانسور طراحی شده است. یک موتور الکتریکی به طور کلی برای چرخش مداوم یا حرکت خطی در مسافت قابل توجه در مقایسه با اندازه آن طراحی شده است. سلونوئیدهای مغناطیسی همچنین مبدل هایی هستند که توان الکتریکی را به حرکت مکانیکی تبدیل می کنند ، اما می توانند حرکت را در فاصله ای محدود تولید کنند.
هر یک از انواع دستگاههایی که معمولاً با استفاده از پدیده های الکترومغناطیسی ، انرژی الکتریکی را به انرژی مکانیکی تبدیل می کنند.
اکثر موتورهای الکتریکی گشتاور مکانیکی خود را از طریق برهم کنش هادی هایی که جریان را در جهت زاویه راست به یک میدان مغناطیسی حمل می کنند ، ایجاد می کنند. انواع مختلف موتورهای الکتریکی در نحوه چیدمان رساناها و میدان و همچنین در کنترل قابل اعمال بر گشتاور ، سرعت و موقعیت مکانیکی متفاوت است. بیشتر انواع اصلی در زیر شرح داده شده است.
موتورهای الکتریکی در طرح های مختلف هنوز اساس فناوری درایو ما هستند: از موتورهای کم مصرف ، طرح های بهداشتی یا ضد انفجار ، موتورهای خطی یا سیلندرهای برقی ، ما مطمئناً فقط راه حل موتور مورد نیاز شما را داریم.
تاریخچه موتورهای اولیه الکتریکی :
آزمایش الکترومغناطیسی فارادی ، ۱۸۲۱ قبل از موتورهای الکترومغناطیسی مدرن ، موتورهای آزمایشی که با نیروی الکترواستاتیک کار می کردند مورد بررسی قرار گرفتند. اولین موتورهای الکتریکی دستگاههای الکترواستاتیک ساده ای بودند که در آزمایشهای راهب اسکاتلندی اندرو گوردون و آزمایشگر آمریکایی بنیامین فرانکلین در دهه ۱۷۴۰ توصیف شد.اصل نظری پشت آنها ، قانون کولم ، توسط هنری کاوندیش در ۱۷۷۱ کشف شد ، اما منتشر نشد. این قانون به طور مستقل توسط چارلز-آگوستین دو کولومب در ۱۷۸۵ کشف شد ، که آن را به گونه ای منتشر کرد که اکنون با نام او شناخته می شود.به دلیل مشکل در ایجاد ولتاژهای بالا مورد نیاز ، موتورهای الکترواستاتیک هرگز برای اهداف عملی استفاده نمی شوند.
اختراع باتری الکتروشیمیایی توسط الساندرو ولتا در ۱۷۹۹ ،تولید جریانهای الکتریکی مداوم را ممکن ساخت. هانس کریستین اورستد در سال ۱۸۲۰ کشف کرد که جریان الکتریکی یک میدان مغناطیسی ایجاد می کند ، که می تواند بر آهنربای نیرو وارد کند. تنها چند هفته طول کشید تا آندره ماری آمپر اولین فرمول فعل و انفعال الکترومغناطیسی را ارائه دهد و قانون نیروی آمپر را ارائه دهد ، که تولید نیروی مکانیکی را برهم کنش جریان الکتریکی و میدان مغناطیسی توصیف می کند.اولین نمایش اثر با حرکت دوار توسط مایکل فارادی در سال ۱۸۲۱ انجام شد. یک سیم آویزان آزاد در حوضچه ای از جیوه فرو رفت ، که روی آن آهنربای دائمی (PM) قرار داده شد. هنگامی که جریانی از سیم عبور می کرد ، سیم به دور آهنربا می چرخید و نشان می داد که جریان باعث ایجاد میدان مغناطیسی دایره ای نزدیک سیم می شود.این موتور اغلب در آزمایشات فیزیک نشان داده می شود و جیوه (سمی) را با آب نمک جایگزین می کند. چرخ بارلو اصلاح اولیه این تظاهرات فارادی بود ، اگرچه این موتورها و موتورهای هم قطبی مشابه آن تا اواخر قرن برای استفاده عملی مناسب نبود.
“روتور خود الکترومغناطیسی” جیدلیک ، ۱۸۲۷ (موزه هنرهای کاربردی ، بوداپست). موتور تاریخی هنوز هم امروز کاملاً کار می کند.
یک موتور الکتریکی توسط جیمز ژول در سال ۱۸۴۲ به موزه هانتریان ، گلاسکو به کلوین ارائه شد
در سال ۱۸۲۷ ، فیزیکدان مجارستانی osnyos Jedlik آزمایش با سیم پیچ های الکترومغناطیسی را آغاز کرد. بعد از اینکه جدلیک مشکلات فنی چرخش مداوم را با اختراع کموتاتور حل کرد ، دستگاههای اولیه خود را “خود روتورهای الکترومغناطیسی” نامید. اگرچه از آنها فقط برای آموزش استفاده می شد ، اما در سال ۱۸۲۸ Jedlik اولین دستگاهی را که شامل سه جزء اصلی موتورهای DC مستقیم استاتور ، روتور و کموتاتور بود ، نشان داد. این دستگاه از آهن ربا دائمی استفاده نمی کند ، زیرا میدان مغناطیسی هر دو قطعه ثابت و گردان تنها توسط جریانهایی که از سیم پیچ های آنها عبور می کند تولید می شود.
موتورهای DC
اولین موتور الکتریکی کموتاتور DC با قابلیت چرخش ماشین آلات توسط دانشمند انگلیسی ویلیام استرجن در سال ۱۸۳۲ اختراع شد.به دنبال کار استرجن ، یک موتور الکتریکی از نوع کموتاتور توسط مخترع آمریکایی توماس داونپورت و همسرش امیلی داونپورت ساخته شدکه وی در سال ۱۸۳۷ ثبت اختراع کرد. موتورها تا ۶۰۰ دور در دقیقه می چرخیدند و از دستگاه استفاده می کردند. ابزار و ماشین چاپ.به دلیل هزینه بالای باتری اولیه ، موتورها از نظر تجاری ناموفق بودند و Davenport ورشکست شد. چندین مخترع در توسعه موتورهای DC از Sturgeon پیروی کردند ، اما همه آنها با مسائل مربوط به هزینه باتری مواجه شدند. از آنجا که در آن زمان هیچ سیستم توزیع برق در دسترس نبود ، هیچ بازار تجاری عملی برای این موتورها بوجود نیامد.
پس از بسیاری از تلاشهای کم و بیش موفقیت آمیز دیگر با دستگاههای چرخشی و رفت و برگشتی نسبتاً ضعیف ، موریتز فون ژاکوبی پروسی/روسی اولین موتور الکتریکی دوار واقعی را در مه ۱۸۳۴ ایجاد کرد. این موتور قدرت خروجی مکانیکی قابل توجهی را توسعه داد. موتور او یک رکورد جهانی به ثبت رساند که Jacobi چهار سال بعد در سپتامبر ۱۸۳۸ آن را بهبود بخشید. موتور دوم او به اندازه ای قدرتمند بود که می توانست با یک قایق با ۱۴ نفر از رودخانه وسیع عبور کند. همچنین در سال ۱۸۳۹/۴۰ بود که توسعه دهندگان دیگر موفق به ساخت موتورهایی با عملکرد مشابه و سپس بالاتر شدند.
در سال ۱۸۵۵ ، جدلیک دستگاهی را با استفاده از اصول مشابه آنچه در روتورهای الکترومغناطیسی خود استفاده می کرد ، ساخت که می تواند کار مفیدی انجام دهد.او در همان سال یک وسیله نقلیه الکتریکی ساخت.
یک نقطه عطف بزرگ در سال ۱۸۶۴ رخ داد ، هنگامی که آنتونیو پاچینوتی اولین بار حلقه حلقه را توصیف کرد (اگرچه در ابتدا در ژنراتور DC ، یعنی دینامو تصور می شد).این سیم پیچ های گروه بندی متقارن بر روی خود بسته و به میله های یک کموتاتور متصل می شوند ، برس های آنها عملاً جریان بدون نوسان را ارائه می دهند.اولین موتورهای DC موفق تجاری به دنبال پیشرفت های Zenobme Gramme بودند که در سال ۱۸۷۱ ، طراحی پاچینوتی را دوباره ابداع کرد و راه حل هایی توسط ورنر زیمنس اتخاذ کرد.
منفعت ماشین های DC از کشف برگشت پذیری ماشین الکتریکی ناشی شد که توسط زیمنس در سال ۱۸۶۷ اعلام شد و توسط پاچینوتی در سال ۱۸۶۹ مشاهده شد.گرام به طور تصادفی آن را به مناسبت نمایشگاه جهانی وین در سال ۱۸۷۳ نشان داد ، هنگامی که دو دستگاه DC را در فاصله ۲ کیلومتری یکدیگر متصل کرد ، از یکی از آنها به عنوان ژنراتور و دیگری به عنوان موتور استفاده کرد.
روتور درام توسط Friedrich von Hefner-Alteneck از Siemens & Halske برای جایگزینی آرماتور حلقه Pacinotti در سال ۱۸۷۲ معرفی شد و بنابراین کارایی دستگاه را بهبود بخشید.روتور لمینت توسط زیمنس و هالسک در سال بعد معرفی شد و باعث کاهش تلفات آهن و افزایش ولتاژهای القایی شد. در سال ۱۸۸۰ ، یوناس ونستروم ، روتور را برای قرار دادن سیم پیچ در اختیار روتور قرار داد و کارایی را بیشتر افزایش داد.
در سال ۱۸۸۶ ، فرانک جولیان اسپراگ اولین موتور عملی DC را اختراع کرد ، یک دستگاه بدون جرقه که سرعت نسبتاً ثابت را تحت بارهای متغیر حفظ می کرد. سایر اختراعات الکتریکی Sprague در این زمان توزیع الکتریکی شبکه را بسیار بهبود بخشید (کارهای قبلی که در زمان استفاده از توماس ادیسون انجام شده بود) ، اجازه می داد نیروی موتورهای الکتریکی به شبکه برق بازگردانده شود ، برای توزیع الکتریکی به چرخ دستی ها از طریق سیمهای سربار و قطب چرخ دستی ، و سیستم های کنترلی برای عملیات الکتریکی ارائه داد. این به Sprague اجازه داد تا از موتورهای برقی برای اولین سیستم واگن برقی در سالهای ۱۸۸۷-۱۸۸۸ در ریچموند ، ویرجینیا ، آسانسور برقی و سیستم کنترل در ۱۸۹۲ ، و مترو الکتریکی با اتومبیلهای کنترل مرکزی مستقل استفاده کند. دومی برای اولین بار در سال ۱۸۹۲ در شیکاگو توسط راه آهن بالابری جنوبی نصب شد ، جایی که در بین مردم به عنوان “L” معروف شد. موتور Sprague و اختراعات مربوطه منجر به انفجار علاقه و استفاده در موتورهای الکتریکی برای صنعت شد. توسعه موتورهای الکتریکی با کارایی قابل قبول برای چندین دهه به دلیل عدم تشخیص اهمیت فوق العاده فاصله هوا بین روتور و استاتور به تأخیر افتاد. طراحی های کارآمد دارای یک فاصله هوایی نسبتاً کوچک هستند.
موتورهای الکتریکی انقلابی در صنعت ایجاد کردند. فرآیندهای صنعتی دیگر با انتقال نیرو با استفاده از شفت خط ، تسمه ، هوای فشرده یا فشار هیدرولیک محدود نمی شوند. در عوض ، هر دستگاه می تواند به منبع تغذیه خود مجهز شده و کنترل آسان را در محل استفاده فراهم کند و کارایی انتقال نیرو را بهبود بخشد.
موتورهای الکتریکی که در کشاورزی استفاده می شوند قدرت عضلات انسان و حیوانات را از کارهایی مانند حمل دانه یا پمپاژ آب حذف می کنند. استفاده خانگی (مانند ماشین های لباسشویی ، ماشین ظرفشویی ، فن ، کولر و یخچال (جایگزین جعبه یخ)) از موتورهای الکتریکی باعث کاهش نیروی کار سنگین در خانه می شود و استانداردهای راحتی ، راحتی و ایمنی بالاتری را ممکن می سازد. امروزه موتورهای برقی بیش از نیمی از انرژی الکتریکی تولید شده در ایالات متحده را مصرف می کنند.
موتورهای AC
در سال ۱۸۲۴ ، فرانسوا آراگو ، فیزیکدان فرانسوی ، وجود میدان های مغناطیسی دوار را فرمول بندی کرد ، چرخش های آراگو را نامید ، که با روشن و خاموش کردن دستی کلیدها ، والتر بیلی در سال ۱۸۷۹ به عنوان اولین موتور القایی اولیه نشان داد.در دهه ۱۸۸۰ بسیاری از مخترعین سعی داشتند موتورهای AC قابل کار را توسعه دهند زیرا مزایای AC در انتقال ولتاژ بالا در مسافت های طولانی با عدم توانایی در کارکرد موتورها بر روی AC جبران شد.
اولین موتور القایی بدون جابجایی جریان متناوب توسط گالیله فراری در سال ۱۸۸۵ اختراع شد. فراری توانست اولین طرح خود را با تولید تنظیمات پیشرفته تر در سال ۱۸۸۶ بهبود بخشد. در سال ۱۸۸۸ ، آکادمی سلطنتی علوم تورین ، تحقیقات فراری را با جزئیات مبانی عملکرد موتور منتشر کرد ، در حالی که در آن زمان به این نتیجه رسید که “دستگاه بر اساس آن اصل نمی تواند به عنوان موتور از نظر تجاری اهمیت تجاری داشته باشد.
توسعه صنعتی احتمالی توسط نیکولا تسلا تصور می شد ، که موتور القایی خود را در سال ۱۸۸۷ به طور مستقل اختراع کرد و در ماه مه ۱۸۸۸ موفق به ثبت اختراع شد. در همان سال ، تسلا مقاله خود را با عنوان A New System of Alternate Current Motors and Transformers به AIEE ارائه داد که در آن سه اختراع ثبت شده بود. دو نوع موتور چهار فاز چهار استاتور قطبی: یکی با روتور چهار قطبی که یک موتور عدم تمایل خود را راه اندازی می کند ، دیگری با روتور زخم که یک موتور القایی خود راه انداز را تشکیل می دهد و سوم یک موتور همزمان همزمان واقعی با جداگانه منبع DC هیجان زده به سیم پیچ روتور. یکی از اختراعاتی که تسلا در سال ۱۸۸۷ ثبت کرد ، با این حال ، موتور القایی روتور با سیم پیچ کوتاه را نیز توصیف کرد. جورج وستینگهاوس ، که قبلاً حقوق خود را از فراری (۱۰۰۰ دلار آمریکا) گرفته بود ، بلافاصله حق ثبت اختراع تسلا (۶۰،۰۰۰ دلار بعلاوه ۲٫۵۰ دلار آمریکا به ازای هر اسب بخار فروخته شده ، تا ۱۸۹۷ پرداخت شد) را خرید ، تسلا را برای توسعه موتورهای خود به کار گرفت و C.F. اسکات برای کمک به تسلا ؛ با این حال ، تسلا در سال ۱۸۸۹ عازم سایر فعالیت ها شد.موتور القایی AC ثابت ثابت شد که برای ماشینهای خیابانی مناسب نیست، اما مهندسان وستینگهاوس با موفقیت آن را برای قدرت بخشیدن به یک عملیات معدن در تلوراید ، کلرادو در ۱۸۹۱ تطبیق دادند. وستینگهاوس اولین موتور القایی عملی خود را در سال ۱۸۹۲ به دست آورد و خطی از موتورهای القایی ۶۰ فاز ۶۰ هرتزی را در ۱۸۹۳ توسعه داد ، اما این موتورهای اولیه وستینگهاوس موتورهای دو فاز با روتورهای زخم بودند. B.G. لام بعداً یک روتور سیم پیچ نواری دوار ایجاد کرد.
میخائیل دولیو-دوبروولسکی در ترویج توسعه سه فاز خود ، موتور القایی سه فاز را در ۱۸۸۹ ، از هر دو نوع روتور قفس و روتور زخم با رئوستات شروع کننده و ترانسفورماتور سه اندام در ۱۸۹۰ اختراع کرد. پس از توافق بین AEG و Maschinenfabrik Oerlikon ، Doliwo-Dobrowolski و Charles Eugene Lancelot Brown مدلهای بزرگتری را توسعه دادند ، یعنی یک قفس سنجابی ۲۰ اسب بخاری و یک روتور زخم ۱۰۰ اسب بخار با رئوستات شروع کننده. اینها اولین موتورهای سه فاز ناهمزمان مناسب برای عملیات عملی بودند.از سال ۱۸۸۹ ، توسعه مشابه ماشین آلات سه فاز Wenström آغاز شد. در ۱۸۹۱ نمایشگاه بین المللی الکتروتکنیک فرانکفورت ، اولین سیستم سه فاز راه دور با موفقیت ارائه شد. قدرت آن ۱۵ کیلو ولت بود و بیش از ۱۷۵ کیلومتر از آبشار لافن در رودخانه نکر گسترش یافت.
نیروگاه Lauffen شامل یک دینام ۲۴۰ کیلووات ۸۶ V 40 هرتز و یک ترانسفورماتور گام به گام در حالی که در نمایشگاه یک ترانسفورماتور گام به گام یک موتور القایی سه فاز ۱۰۰ اسب بخاری که از یک آبشار مصنوعی تغذیه می کرد تغذیه می کرد ، که نشان دهنده انتقال اصلی است. منبع تغذیه.القای سه فاز در حال حاضر برای اکثر قریب به اتفاق کاربردهای تجاری استفاده می شود.میخائیل دولیو-دوبروولسکی ادعا کرد که موتور تسلا به دلیل ضربان قلب دو فاز عملی نیست ، که باعث شد او در کار سه فاز خود پافشاری کند.
شرکت جنرال الکتریک در سال ۱۸۹۱ توسعه موتورهای القایی سه فاز را آغاز کرد.تا سال ۱۸۹۶ ، جنرال الکتریک و وستینگهاوس یک توافقنامه مجوز متقابل برای طراحی روتور نوار سیم پیچ ، که بعداً روتور قفس سنجابی نامیده شد ، امضا کردند.پیشرفت موتورهای القایی ناشی از این اختراعات و نوآوریها به حدی بود که یک موتور القایی ۱۰۰ اسب بخار در حال حاضر دارای ابعاد نصب یک موتور ۷٫۵ اسب بخار در ۱۸۹۷ است.
نکته قابل توجه:
قطعه مقابل موتور الکتریکی ژنراتور است که ساختار مشابهی دارد. ژنراتورها حرکت مکانیکی را به نیروی الکتریکی تبدیل می کنند. اساس فیزیکی هر دو فرایند القای الکترومغناطیسی است. در یک ژنراتور ، هنگامی که یک رسانا در یک میدان مغناطیسی متحرک قرار دارد ، جریان القا می شود و انرژی الکتریکی ایجاد می شود. در همین حال ، در یک موتور الکتریکی یک هادی حامل جریان باعث ایجاد میدان های مغناطیسی می شود. نیروهای متناوب جاذبه و دافعه آنها زمینه ای برای ایجاد حرکت ایجاد می کنند.
موتور الکتریکی چگونه کار می کند؟
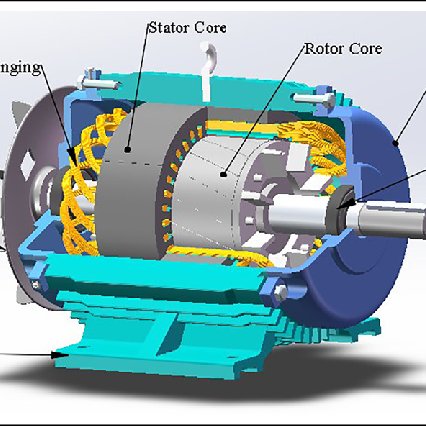
به طور کلی ، قلب یک موتور الکتریکی شامل یک استاتور و یک روتور است. اصطلاح “استاتور” از فعل لاتین “stare” = “ساکن ماندن” گرفته شده است. استاتور قسمت بی حرکت یک موتور الکتریکی است. آن را محکم به مسکن به همان اندازه بی حرکت متصل شده است. روتور برعکس بر روی محور موتور نصب شده و می تواند حرکت کند (بچرخد).
در مورد موتورهای AC ، استاتور شامل هسته به اصطلاح چند لایه است که در سیمهای مسی پیچیده شده است. سیم پیچ به عنوان یک سیم پیچ عمل می کند و هنگامی که جریان در سیم ها جریان می یابد ، یک میدان مغناطیسی چرخشی ایجاد می کند. این میدان مغناطیسی ایجاد شده توسط استاتور باعث ایجاد جریان در روتور می شود. این جریان سپس یک میدان الکترومغناطیسی در اطراف روتور ایجاد می کند. در نتیجه ، روتور (و محور موتور متصل شده) می چرخد تا میدان مغناطیسی دوار استاتور را دنبال کند.
موتور الکتریکی برای به کار انداختن حرکت چرخشی ایجاد شده به منظور حرکت دادن یک واحد دنده (به عنوان مبدل گشتاور و تغییر دهنده سرعت) یا به طور مستقیم به عنوان یک موتور خطی حرکت می کند.
چه نوع موتورهای برقی موجود است؟
همه اختراعات با موتور DC شروع شد. امروزه اما موتورهای AC با طرح های مختلف رایج ترین موتورهای الکتریکی در صنعت هستند. همه آنها یک نتیجه مشترک دارند: حرکت چرخشی محور موتور. عملکرد موتورهای AC بر اساس اصل عملکرد الکترومغناطیسی موتور DC است.
موتورهای القایی:
ساده ترین نوع موتور القایی در شکل به صورت مقطع نشان داده شده است. یک مجموعه سه فاز از سیم پیچ های استاتور در شکاف های داخل استاتور وارد شده است. این سیم پیچ ها ممکن است یا در پیکربندی wye ، معمولاً بدون اتصال خارجی به نقطه خنثی ، یا در پیکربندی دلتا متصل شوند. روتور متشکل از یک هسته استوانه ای آهنی با هادی هایی است که در شکاف های اطراف سطح قرار گرفته اند. در معمول ترین شکل ، این هادی های روتور در هر انتهای روتور توسط یک حلقه انتهایی رسانا به یکدیگر متصل می شوند.
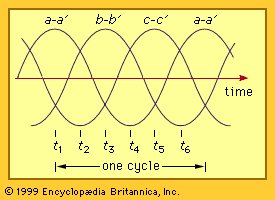
اساس عملکرد موتور القایی ممکن است ابتدا با فرض اتصال سیم پیچ های استاتور به منبع الکتریکی سه فاز و مجموعه ای از سه جریان سینوسی شکل نشان داده شده در سیم پیچ استاتور ایجاد شود. این شکل تأثیر این جریانها را در تولید میدان مغناطیسی در عرض هوا دستگاه به مدت شش لحظه در یک چرخه نشان می دهد. برای سادگی ، فقط حلقه هادی مرکزی برای هر سیم پیچ فاز نشان داده شده است. در لحظه t1 در شکل ، جریان در فاز a حداکثر مثبت است ، در حالی که در فازهای b و c نصف این مقدار منفی است. نتیجه یک میدان مغناطیسی با توزیع تقریباً سینوسی در اطراف شکاف هوا با حداکثر مقدار بیرونی در بالا و حداکثر مقدار داخلی در پایین است. در زمان t2 در شکل (یعنی یک ششم یک چرخه بعد) ، جریان در فاز c حداکثر منفی است ، در حالی که در فاز b و فاز a نیم مقدار مثبت است.
نتیجه ، همانطور که برای t2 در شکل نشان داده شده است ، دوباره یک میدان مغناطیسی توزیع شده سینوسی است اما ۶۰ درجه خلاف جهت عقربه های ساعت می چرخد. بررسی توزیع فعلی برای t3 ، t4 ، t5 و t6 نشان می دهد که میدان مغناطیسی با گذشت زمان به چرخش خود ادامه می دهد. این میدان یک دور را در یک چرخه جریانهای استاتور تکمیل می کند. بنابراین ، اثر ترکیبی سه جریان سینوسی مساوی ، که به طور یکنواخت در زمان جابجا شده و در سه سیم پیچ استاتور به طور یکنواخت در موقعیت زاویه ای جابجا می شوند ، تولید میدان مغناطیسی دوار با قدر ثابت و سرعت زاویه ای مکانیکی است که بستگی به فرکانس منبع برق.
حرکت دورانی میدان مغناطیسی نسبت به رساناهای روتور باعث ایجاد ولتاژ در هریک ، متناسب با قدر و سرعت میدان نسبت به رساناها می شود. از آنجایی که هادی های روتور در هر انتهای اتصال کوتاه دارند ، تأثیر آن باعث ایجاد جریان در این رساناها می شود. در ساده ترین حالت کار ، این جریانها تقریبا برابر ولتاژ القایی تقسیم بر مقاومت هادی خواهند بود.
الگوی جریانات روتور برای t1 لحظه ای شکل در این شکل نشان داده شده است. به نظر می رسد که جریانها تقریباً به صورت سینوسی در اطراف روتور توزیع شده اند و طوری قرار گرفته اند که گشتاور خلاف جهت عقربه های ساعت روی روتور ایجاد می کنند (یعنی گشتاور در همان جهت چرخش میدان). این گشتاور برای سرعت بخشیدن به روتور و چرخاندن بار مکانیکی عمل می کند. با افزایش سرعت چرخش روتور ، سرعت آن نسبت به میدان چرخش کاهش می یابد. بنابراین ، ولتاژ القایی کاهش می یابد و منجر به کاهش نسبی جریان هادی روتور و گشتاور می شود. سرعت روتور زمانی به یک ثبات می رسد که گشتاور تولید شده توسط جریانهای روتور با گشتاور مورد نیاز در آن سرعت توسط بار بدون گشتاور اضافی موجود برای تسریع اینرسی ترکیبی بار و موتور برابر باشد.
توان خروجی مکانیکی باید توسط نیروی ورودی برق تأمین شود. جریانهای استاتور اصلی نشان داده شده در شکل فقط برای تولید میدان مغناطیسی دوار کافی است. برای حفظ این میدان چرخشی در حضور جریان های روتور شکل ، لازم است سیم پیچ های استاتور یک جزء اضافی از جریان سینوسی به این بزرگی و فاز را حمل کنند تا اثر میدان مغناطیسی که در غیر این صورت تولید می شود را لغو کند. توسط جریانهای روتور در شکل. مجموع جریان استاتور در هر سیم پیچ فاز ، مجموع یک جزء سینوسی برای تولید میدان مغناطیسی و یک سینوسی دیگر است ، که باعث می شود جریان اول یک چهارم یک چرخه یا ۹۰ درجه باشد و نیروی الکتریکی مورد نیاز را تأمین کند. مولفه دوم یا قدرت ، در مرحله فاز ولتاژ اعمال شده به استاتور است ، در حالی که مولفه اول یا مغناطیسی کننده ، ولتاژ اعمال شده را یک چهارم چرخه یا ۹۰ درجه کاهش می دهد. در بار نامی ، این جزء مغناطیسی معمولاً در محدوده ۰٫۴ تا ۰٫۶ بزرگی جزء قدرت است.
اکثر موتورهای القایی سه فاز با سیم پیچ های استاتور خود مستقیماً به منبع برق سه فاز ولتاژ ثابت و فرکانس ثابت متصل می شوند. ولتاژهای معمولی منبع تغذیه از ۲۳۰ ولت خط به خط برای موتورهای با قدرت نسبتاً کم (به عنوان مثال ۰٫۵ تا ۵۰ کیلووات) تا حدود ۱۵ کیلو ولت خط به خط برای موتورهای پرقدرت تا حدود ۱۰ مگاوات متغیر است.
به جز افت ولتاژ کوچک در مقاومت سیم پیچ استاتور ، ولتاژ منبع تغذیه با نرخ زمان تغییر شار مغناطیسی در استاتور دستگاه مطابقت دارد. بنابراین ، با منبع فرکانس ثابت و ولتاژ ثابت ، مقدار میدان مغناطیسی دوار ثابت نگه داشته می شود و گشتاور تقریباً متناسب با جزء قدرت جریان تغذیه است.
با موتور القایی نشان داده شده در شکل های بالا ، میدان مغناطیسی در هر دور یک فرکانس تغذیه یک دور می چرخد. برای منبع تغذیه ۶۰ هرتز ، سرعت میدان ۶۰ دور در ثانیه یا ۳۶۰۰ در دقیقه است. سرعت روتور به اندازه ای کمتر از سرعت میدان است که فقط کافی است ولتاژ مورد نیاز را در رساناهای روتور ایجاد کند تا جریان روتور مورد نیاز برای گشتاور بار را تولید کند. در بار کامل ، سرعت معمولاً ۰٫۵ تا ۵ درصد کمتر از سرعت میدان است (که اغلب به آن سرعت همزمان می گویند) و درصد بالاتری برای موتورهای کوچکتر اعمال می شود. این تفاوت در سرعت اغلب به عنوان لغزش نامیده می شود.
با ساخت یک ماشین با تعداد بیشتری جفت قطب مغناطیسی ، بر خلاف ساختار دو قطبی شکل ، می توان سایر سرعتهای همزمان را با تامین فرکانس ثابت بدست آورد. مقادیر احتمالی سرعت میدان مغناطیسی در دور در دقیقه ۱۲۰ f/p است که f فرکانس هرتز (چرخه در ثانیه) و p تعداد قطب ها (که باید یک عدد زوج باشد) است. یک قاب آهنی داده شده را می توان با استفاده از سیم پیچ هایی که زاویه تقریبی (۳۶۰/p) درجه دارند ، برای هر یک از چندین تعداد ممکن از جفت قطب ها پیچ کرد. گشتاور موجود در قاب ماشین بدون تغییر باقی می ماند ، زیرا متناسب با حاصلضرب میدان مغناطیسی و جریان سیم پیچ مجاز است. بنابراین ، قدرت قدرت برای قاب ، محصول گشتاور و سرعت است ، تقریباً معکوس با تعداد جفت های قطب متناسب است. رایج ترین سرعتهای همزمان برای موتورهای ۶۰ هرتز ۱۸۰۰ و ۱۲۰۰ دور در دقیقه است.
ساخت موتورهای القایی:
قاب استاتور شامل ورقه های فولادی سیلیکون ، معمولاً با ضخامت حدود ۰٫۵ میلی متر است. لمینت لازم است زیرا ولتاژ در طول محوری فولاد و همچنین در رساناهای استاتور ایجاد می شود. روکش ها معمولاً توسط یک لایه لاک از یکدیگر عایق بندی می شوند. این امر مسیر رسانایی در فولاد را شکسته و تلفات (معروف به تلفات گردابی) را در فولاد محدود می کند.
سیم پیچ های استاتور معمولاً از مس ساخته می شوند. برای موتورهای کوچک از هادی های دور زیاد در هر سیم پیچ استفاده می شود و برای ماشین های بزرگتر از میله های مستطیلی با دورهای کمتر استفاده می شود. سیم پیچ ها عایق الکتریکی هستند. این یک عمل معمول است که فقط سه سیم به بلوک ترمینال منتقل شود ، آیا سیم پیچ به صورت wye یا delta وصل شده است.
قسمت مغناطیسی روتور نیز از ورقه های فولادی ساخته شده است که عمدتا برای تسهیل ضربه زدن به شکاف های هادی شکل و اندازه مورد نظر است. در بیشتر موتورهای القایی ، سیم پیچ روتور از نوع قفس سنجابی است که رساناهای جامد در شکافها در هر انتهای آهن روتور با هدایت حلقه های انتهایی به هم کوتاه می شوند. در چنین ماشین هایی نیازی به عایق رسانا از آهن نیست. برای موتورهای تا حدود ۳۰۰ کیلووات ، قفس سنجاب اغلب شامل یک ریخته گری آلومینیومی است که هادی ها ، حلقه های انتهایی و یک فن خنک کننده را شامل می شود. برای موتورهای بزرگتر ، قفس سنجاب از میله های مس ، آلومینیوم یا برنج ساخته شده است که به حلقه های انتهایی از مواد مشابه جوش داده شده یا لحیم کاری شده است. در هر صورت ، روتور بسیار مقاوم است و همچنین تولید آن در مقایسه با روتورهایی که به سیم پیچ عایق الکتریکی نیاز دارند ، مقرون به صرفه است.
شکافهای روتور نیازی به مستطیل ندارند. شکل شکاف ها می تواند طوری طراحی شود که انواع ویژگی های سرعت گشتاور را ارائه دهد.

ویژگی ها:
هنگامی که از منبع تغذیه با فرکانس ثابت استفاده می شود ، موتور القایی سه فاز اساساً یک درایو با سرعت ثابت است و با افزایش گشتاور بار از صفر به مقدار نامناسب ، سرعت فقط ۱ تا ۵ درصد کاهش می یابد. در اکثر تأسیسات ، موتورهای القایی را می توان با اتصال مستقیم پایانه های استاتور به منبع برق راه اندازی و افزایش داد. این امر باعث می شود که میدان چرخشی در دستگاه ایجاد شود. در سرعت صفر سرعت این میدان نسبت به روتور زیاد است. اگر جریان روتور فقط با مقاومت میله های روتور محدود می شد ، جریانهای روتور بسیار زیاد می شد. با این حال ، جریان شروع با مسیرهای اضافی برای میدان مغناطیسی در اطراف هادی استاتور و روتور ، که به عنوان مسیرهای نشت شار شناخته می شوند ، محدود شده است. معمولاً با شروع ولتاژ کامل ، جریان شروع به حدود چهار تا هفت برابر جریان نامی محدود می شود. گشتاور هنگام شروع معمولاً در محدوده ۱٫۷۵ تا ۲٫۵ برابر مقدار نامی است.
اگر جریان استاتور هنگام راه اندازی بیشتر از مقدار مجاز سیستم تغذیه الکتریکی باشد ، موتور را می توان با کاهش ولتاژ حدود ۷۰ تا ۸۰ درصد با استفاده از ترانسفورماتور گام به گام روشن کرد. متناوبا ، سیم پیچ های استاتور را می توان به صورت wye وصل کرد و با نزدیک شدن سرعت به مقدار نامی ، می توان آنها را به دلتا تغییر داد. چنین اقداماتی گشتاور راه اندازی را به میزان قابل توجهی کاهش می دهد. کاهش ولتاژ راه اندازی به ۷۵ درصد منجر به کاهش جریان برق به ۵۶ درصد می شود ، اما همچنین منجر به ۵۶ درصد گشتاور راه اندازی می شود که با ولتاژ کامل تأمین می شود.
استارت های دیگر موتور در طول دوره شروع یک مقاومت یا سلف به صورت سری با هر فاز استاتور وارد می کنند. برای بار با اینرسی بسیار زیاد ، جریان زیاد روتور در هنگام راه اندازی ممکن است باعث گرم شدن بیش از حد روتور شود. در چنین درایو ، ممکن است فرکانس متغیر و منبع ولتاژ از مبدل الکترونیکی برای راه اندازی فراهم شود.
حفاظت:
گرمای ناشی از اتلاف توان در رساناها و قطعات آهنی دستگاه و همچنین گرمای اصطکاک ، باید توسط سیستم خنک کننده حذف شود تا دمای موتور محدود شود. هدف اصلی دستگاه حفاظتی جلوگیری از آسیب به آسیب پذیرترین قسمت موتور ، عایق روی سیم پیچ های استاتور است. برای موتورهای کم مصرف ، اغلب یک دستگاه حساس به دما در داخل موتور نصب می شود و در صورت رسیدن دما به مقدار ایمن محدود ، از آن برای خاموش کردن منبع تغذیه استفاده می شود. با موتورهای بزرگتر ، آشکارسازهای حساس به دما ممکن است در یک یا چند مکان در سیم پیچ های استاتور تعبیه شوند.
موتورهای القایی روتور(Wound)
برخی از موتورهای القایی خاص با سیم پیچ های عایق بندی شده در روتور مشابه موتورهای سیم پیچ استاتور ساخته می شوند. سیم پیچ های روتور معمولاً از نوع سه فاز با سه اتصال به حلقه های رسانای عایق (معروف به حلقه های لغزنده) نصب شده بر روی قسمت داخلی محور روتور هستند. برس های کربنی اتصالات الکتریکی خارجی را فراهم می کنند.
یک موتور روتور زخمی با سه مقاومت متصل به حلقه های لغزش می تواند گشتاور راه اندازی بالا را بدون جریان راه اندازی زیاد ایجاد کند. با تغییر مقاومت ، می توان درجه کنترل سرعت را برای برخی از انواع بارهای مکانیکی ارائه کرد. با این حال ، کارآیی چنین درایوهایی پایین است مگر اینکه سرعت به دلیل تلفات زیاد در مقاومت مدار روتور ، به طور منطقی به مقدار همزمان نزدیک باشد. به عنوان یک جایگزین ، یک سیستم الکترونیکی یکسو کننده-اینورتر می تواند به حلقه های لغزش روتور متصل شود تا نیرو را از بین ببرد و دوباره به سیستم تامین برق تغذیه کند. این ترتیب ، که معمولاً سیستم بازیابی لغزش نامیده می شود ، کنترل سرعت را با کارایی قابل قبول فراهم می کند.
موتورهای القایی تک فاز:
توسعه یک میدان دوار در یک ماشین القایی مستلزم مجموعه ای از جریانهای جابجا شده در فاز است (همانطور که در شکل نشان داده شده است) که در مجموعه ای از سیم پیچ های استاتور که در اطراف محیط استاتور جابجا شده اند جریان دارند. در حالی که این امر در جایی که منبع سه فاز در دسترس است ساده است ، اکثر لوازم تجاری و داخلی فقط یک فاز هستند ، معمولاً با ولتاژ ۱۲۰ یا ۲۴۰ ولت. روشهای مختلفی وجود دارد که به وسیله آنها می توان میدان گردان لازم را از این منبع تک فاز تولید کرد.
موتور القایی خازن
این موتور مشابه موتور سه فاز است با این تفاوت که تنها دو سیم پیچ (a-a ′ و b-b ′) روی استاتور خود دارد که ۹۰ درجه از یکدیگر جابجا شده اند. سیم پیچ a-a directly مستقیماً به منبع تک فاز متصل می شود. برای شروع ، سیم پیچ b-b ((که معمولاً سیم پیچ کمکی نامیده می شود) از طریق یک خازن (دستگاهی که بار الکتریکی را ذخیره می کند) به همان منبع متصل می شود. تأثیر خازن این است که جریان وارد شده به سیم پیچ b-b approximately جریان را در a-a approximately تقریباً ۹۰ درجه یا یک چهارم یک چرخه هدایت کند ، در حالیکه روتور در حالت سکون قرار دارد. بنابراین ، میدان چرخش و گشتاور شروع ارائه می شود.
با نزدیک شدن سرعت موتور به مقدار نامی خود ، دیگر نیازی به تحریک سیم پیچ کمکی برای حفظ میدان چرخشی نیست. جریانهای تولید شده در میله های قفس سنجابی روتور هنگام عبور از سیم پیچ a-a change با تغییر ناچیز در حین چرخش از سیم پیچ b-b ′ حفظ می شوند. روتور می تواند به تولید میدان دوار ادامه دهد و فقط سیم پیچ a-a را وصل کند. سیم پیچ b-b usually معمولاً توسط یک سوئیچ گریز از مرکز قطع می شود که هنگامی باز می شود که سرعت حدود ۸۰ درصد از مقدار نامی باشد.
اجزاء الکترو موتور ها:

از نظر الکتریکی ، یک موتور شامل دو جزء است که نسبت به یکدیگر حرکت می کنند و با هم یک مدار مغناطیسی تشکیل می دهند:
آهنرباهای میدان – این قسمت یک میدان مغناطیسی ایجاد می کند که از آرماتور عبور می کند. این معمولاً مجموعه ای از آهنرباهای الکتریکی است که روتور را احاطه کرده است ، شامل سیم پیچ هایی روی یک هسته آهن فرومغناطیس است که میدان مغناطیسی را هدایت می کند. متناوباً می تواند یک یا چند آهنربای دائمی باشد.
آرماتور – این قسمتی است که جریان الکتریکی از طریق آن جریان می یابد و نیرو را ایجاد می کند. مانند سیم پیچ های میدان ، از سیم پیچ روی یک هسته فرومغناطیس تشکیل شده است. هنگامی که جریان الکتریکی از سیم عبور می کند ، میدان مغناطیسی مغناطیس میدان بر آن نیرویی وارد می کند که نیروی لورنتز نامیده می شود و روتور را می چرخاند.
یکی از این اجزا بر روی استاتور نصب شده است ، قسمت ثابت موتور به قاب متصل است ، دیگری روی روتور است ، قسمتی که می چرخد. آهنربای میدان معمولاً روی استاتور و آرمیچر روی روتور قرار دارد ، اما در برخی از انواع موتور این حالت معکوس است.از نظر مکانیکی ، یک موتور از این قطعات تشکیل شده است
روتور ها:
در موتور الکتریکی ، قسمت متحرک روتور است که محور را می چرخاند تا نیروی مکانیکی را تحویل دهد. روتور معمولاً دارای هادی هایی است که جریان هایی را منتقل می کنند که میدان مغناطیسی استاتور برای چرخاندن محور به آنها نیرو وارد می کند. از طرف دیگر ، برخی از روتورها آهنرباهای دائمی را حمل می کنند و استاتور هادی ها را نگه می دارد.
باید بین استاتور و روتور فاصله هوا وجود داشته باشد تا بتواند بچرخد. عرض شکاف بر ویژگی های الکتریکی موتور تأثیر بسزایی دارد. به طور کلی تا آنجا که ممکن است کوچک ساخته می شود ، زیرا یک شکاف بزرگ تأثیر منفی منفی زیادی بر عملکرد دارد. این منبع اصلی ضریب توان کم است که موتورها در آن کار می کنند. جریان مغناطیسی افزایش می یابد و ضریب توان با فاصله هوا کاهش می یابد ، بنابراین شکاف های باریک بهتر است. شکاف های بسیار کوچک ممکن است علاوه بر سر و صدا و تلفات ، مشکلات مکانیکی ایجاد کنند.
بیرینگ ها:
روتور توسط یاتاقان ها پشتیبانی می شود که به چرخان اجازه می دهد محور خود را بچرخاند. یاتاقانها به نوبه خود توسط محفظه موتور پشتیبانی می شوند. محور موتور از طریق یاتاقان ها به خارج موتور ، جایی که بار وارد می شود ، گسترش می یابد. از آنجا که نیروهای بار فراتر از بیرونی ترین یاتاقان اعمال می شوند ، گفته می شود که بار بیش از حد متوقف می شود.
استاتور ها:
استاتور قسمت ثابت مدار الکترومغناطیسی موتور است که روتور را احاطه کرده است و معمولاً از آهنرباهای میدان تشکیل شده است که یا الکترومغناطیس متشکل از سیم پیچ در اطراف یک هسته آهن فرومغناطیس یا آهنرباهای دائمی هستند. این یک میدان مغناطیسی ایجاد می کند که از طریق آرماتور روتور عبور می کند و بر سیم پیچ ها نیرو وارد می کند. هسته استاتور از ورق های فلزی نازکی تشکیل شده است که از یکدیگر عایق بندی شده اند و لمینت نامیده می شوند. لمینت ها برای کاهش اتلاف انرژی که در صورت استفاده از هسته جامد به وجود می آید ، استفاده می شود. موتورهای بسته بندی شده با رزین ، که در ماشین های لباسشویی و کولرها استفاده می شوند ، از خواص میرایی رزین (پلاستیک) برای کاهش صدا و ارتعاش استفاده می کنند. این موتورها کاملاً استاتور را در پلاستیک قرار می دهند.
سیم پیچ ها:
سیم پیچ ها سیم هایی هستند که در سیم پیچ ها قرار می گیرند و معمولاً در اطراف یک هسته مغناطیسی آهنی نرم چند لایه پیچیده می شوند تا در صورت برقراری جریان ، قطب های مغناطیسی را تشکیل دهند.
ماشین های الکتریکی دارای دو پیکربندی اصلی قطب مغناطیسی هستند: پیکربندی قطب برجسته و غیرطبیعی. در دستگاه قطب برجسته ، مغناطیس مغناطیسی روی روتور و استاتور دارای برآمدگی هایی است که قطب رو به روی یکدیگر قرار دارند و یک سیم در اطراف هر قطب زیر صورت قطب می پیچد ، که هنگام عبور جریان از طریق سیم به قطب های شمال یا جنوب میدان مغناطیسی تبدیل می شود. . در دستگاه غیر قطبی ، یا میدان توزیع شده ، یا دور روتور ، هسته فرومغناطیس قطب های برجسته ای ندارد اما یک استوانه صاف است و سیم پیچ ها به طور مساوی در شکاف های اطراف تقسیم شده اند.
جریان متناوب در سیم پیچ ها قطب هایی در هسته ایجاد می کند که به طور مداوم می چرخند.یک موتور قطب سایه دار دارای یک سیم پیچ در اطراف قسمتی از قطب است که مرحله میدان مغناطیسی را برای آن قطب به تأخیر می اندازد.
برخی از موتورها دارای هادی هایی هستند که از فلز ضخیم تر تشکیل شده اند ، مانند میله ها یا ورق های فلزی ، معمولاً مس ، و آلومینیوم. اینها معمولاً از القای الکترومغناطیسی تغذیه می کنند.
کموتاتور:
کموتاتور یک کلید الکتریکی دوار در برخی از موتورها است که جریان روتور را تامین می کند. این شامل یک استوانه است که از چندین قسمت تماس فلزی روی آرماتور چرخشی دستگاه تشکیل شده است. دو یا چند کنتاکت الکتریکی به نام “برس” از یک ماده رسانای نرم مانند پرس کربن در برابر کموتاتور ساخته شده و در هنگام چرخش با قسمتهای پی در پی کموتاتور تماس کشویی ایجاد می کند و جریان راتور را تأمین می کند. سیم پیچ های روتور به قسمتهای کموتاتور متصل می شوند. کموتاتور به صورت دوره ای جهت فعلی سیم پیچ های روتور را با هر نیم دور (۱۸۰ درجه) معکوس می کند ، بنابراین گشتاور میدان مغناطیسی استاتور روی روتور همیشه در یک جهت است.بدون این برگشت معکوس ، جهت گشتاور در هر سیم پیچ روتور با هر نیم چرخش معکوس می شود ، بنابراین روتور متوقف می شود. کموتاتورها ناکارآمد هستند و موتورهای کم مصرف بیشتر با موتورهای جریان مستقیم بدون برس ، موتورهای آهنربای دائمی و موتورهای القایی جایگزین شده اند.
تامین و کنترل موتور
تامین موتور(Motor supply)
موتور DC معمولاً از طریق کموتاتور حلقه شکاف همانطور که در بالا توضیح داده شد تأمین می شود. تعویض موتورهای AC را می توان با استفاده از یک کموتاتور حلقه لغزش یا تعویض خارجی به دست آورد ، می تواند از نوع کنترل سرعت ثابت یا سرعت متغیر باشد و می تواند از نوع همزمان یا ناهمزمان باشد. موتورهای یونیورسال می توانند بر روی AC یا DC کار کنند.
کنترل موتور:
موتورهای DC را می توان با تنظیم ولتاژ DC اعمال شده به پایانه ها یا با استفاده از مدولاسیون عرض پالس (PWM) با سرعت متغیر کار کرد.
موتورهای AC که با سرعت ثابت کار می کنند عموماً مستقیماً از شبکه یا استارت های نرم موتور تغذیه می شوند.
موتورهای AC که با سرعت های متغیر کار می کنند از انواع مختلف اینورتر قدرت ، درایو فرکانس متغیر یا فن آوری های کموتاتور الکترونیکی استفاده می کنند.
اصطلاح کموتاتور الکترونیکی معمولاً با موتور DC بدون جاروبک خودکار و کاربردهای موتور بی میلی سوئیچ همراه است.
انواع الکتروموتور ها:
موتورهای الکتریکی بر اساس سه اصل فیزیکی متمایز عمل می کنند: مغناطیس ، الکترواستاتیک و پیزوالکتریک.
در موتورهای مغناطیسی ، میدانهای مغناطیسی هم در روتور و هم در استاتور تشکیل می شوند. محصول بین این دو میدان باعث ایجاد نیرو و در نتیجه گشتاور در محور موتور می شود. یک یا هر دو این زمینه ها باید با چرخش روتور تغییر کنند. این کار با خاموش و روشن کردن قطب ها در زمان مناسب یا تغییر قدرت قطب انجام می شود.
انواع اصلی موتورهای DC و موتورهای AC هستند ،که دومی جایگزین اول می شود.
موتورهای الکتریکی AC یا ناهمزمان یا همزمان هستند.پس از راه اندازی ، یک موتور همزمان نیاز به هماهنگی با سرعت میدان مغناطیسی متحرک برای همه شرایط گشتاور معمولی دارد.
در ماشینهای همزمان ، میدان مغناطیسی باید با وسایلی غیر از القاء ، مانند سیم پیچهای مجزا یا آهنرباهای دائمی تأمین شود.
یک موتور با قدرت کسری یا دارای قدرت زیر ۱ اسب بخار (۰٫۷۴۶ کیلو وات) است ، یا با اندازه قاب استاندارد کوچکتر از موتور استاندارد ۱ اسب بخار تولید می شود. بسیاری از موتورهای خانگی و صنعتی در کلاس کسری اسب بخار قرار دارند.
چرخش مستقل از فرکانس ولتاژ AC است.
چرخش برابر است با سرعت همزمان (سرعت موتور-استاتور-میدان).
در SCIM ، چرخش سرعت ثابت برابر سرعت همزمان است ، سرعت لغزش کمتر است.
در سیستم های بازیابی انرژی بدون لغزش ، WRIM معمولاً برای راه اندازی موتور استفاده می شود ، اما می تواند برای تغییر سرعت بار استفاده شود.
عملکرد با سرعت متغیر
در حالی که درایوهای موتور القایی و سنکرون معمولاً دارای خروجی شکل موج شش مرحله ای یا سینوسی هستند ، درایوهای موتور BLDC معمولاً دارای شکل موج جریان ذوزنقه ای هستند. رفتار هر دو دستگاه PM سینوسی و ذوزنقه ای از نظر جنبه های اساسی آنها یکسان است.
در عملکرد با سرعت متغیر ، WRIM در بازیابی انرژی لغزش و ماشینهای القایی دو تغذیه استفاده می شود.
سیم پیچ قفس یک روتور قفس سنجابی با اتصال کوتاه است ، سیم پیچ زخم از خارج از طریق حلقه های لغزش به هم متصل می شود.
عمدتا تک فاز با برخی سه فاز.
اختصارات:
BLAC – AC بدون برس
BLDC – DC بدون برس
BLDM – موتور DC بدون برس
EC – کموتاتور الکترونیکی
PM – آهنربای دائمی
IPMSM-موتور سنکرون آهنربای دائمی داخلی
PMSM – موتور سنکرون آهنربای دائمی
SPMSM – موتور سنکرون آهنربای دائمی سطح
SCIM-موتور القایی قفس سنجابی
SRM – موتور بی میلی سوئیچ شده
SyRM – موتور بی میلی همزمان
VFD-درایو فرکانس متغیر
WRIM-موتور القایی روتور زخم
WRSM-موتور سنکرون روتور زخم
LRA-آمپر روتور قفل شده: جریانی که می توانید در شرایط شروع هنگام اعمال ولتاژ کامل انتظار داشته باشید. در هنگام راه اندازی بلافاصله رخ می دهد.
RLA-آمپرهای بار مجاز: حداکثر جریانی که موتور باید تحت هر شرایطی کار کند. اغلب به اشتباه آمپر بار در حال اجرا نامیده می شود ، که باعث می شود مردم به اشتباه تصور کنند که موتور همیشه باید این آمپرها را بکشد.
FLA-آمپر تمام بار: در سال ۱۹۷۶ به “RLA-آمپر آمپر بار” تغییر کرد.
موتور DC تحریک الکتریکی
یک موتور DC تعویض شده دارای مجموعه ای از سیم پیچ های چرخشی است که بر روی یک آرمیچر نصب شده بر روی یک محور دوار پیچ خورده است. شفت همچنین دارای کموتاتور است ، یک سوئیچ الکتریکی دوامدار طولانی مدت که به طور دوره ای با چرخاندن شفت جریان جریان در سیم پیچ های روتور را معکوس می کند.
بنابراین ، هر موتور DC برس دار دارای AC است که از سیم پیچ های چرخان خود عبور می کند. جریان از طریق یک یا چند جفت برس که روی کموتاتور قرار دارند جریان می یابد. برس ها یک منبع خارجی نیروی الکتریکی را به آرمیچر دوار متصل می کنند.
آرماتور چرخشی شامل یک یا چند سیم پیچ سیم پیچیده شده در اطراف یک مغناطیس مغناطیسی چند لایه و مغناطیسی است. جریان برس ها از طریق کموتاتور و یک سیم پیچ آرماتور عبور می کند و آن را به یک آهنربای موقت (یک الکترومغناطیس) تبدیل می کند. میدان مغناطیسی تولید شده توسط آرماتور با یک میدان مغناطیسی ثابت تولید شده توسط PM یا سیم پیچ دیگر (یک سیم پیچ میدان) ، به عنوان بخشی از قاب موتور ، در تعامل است. نیروی بین دو میدان مغناطیسی تمایل به چرخاندن محور موتور دارد.
کموتاتور با چرخاندن روتور قدرت را به سیم پیچ ها منتقل می کند و قطب های مغناطیسی روتور را از همسویی کامل با قطب های مغناطیسی میدان استاتور دور نگه می دارد ، به طوری که روتور هرگز متوقف نمی شود (مانند سوزن قطب نما) ، بلکه به چرخش ادامه می دهد. تا زمانی که قدرت اعمال شود
بسیاری از محدودیت های موتور DC کموتاتور کلاسیک به دلیل نیاز به برس برای فشار دادن به کموتاتور است. این اصطکاک ایجاد می کند. هنگامی که برس ها از شکاف عایق بین بخشهای کموتاتور عبور می کنند ، جرقه ها توسط برس هایی ایجاد می شوند که مدار را از بین سیم پیچ های روتور ایجاد کرده و می شکنند.
بسته به طراحی کموتاتور ، این ممکن است شامل برس هایی باشد که قسمت های مجاور را کوتاه کرده و در نتیجه سیم پیچ به طور لحظه ای در حال عبور از شکاف ها است. علاوه بر این ، القایی سیم پیچ های روتور باعث می شود که ولتاژ در هر یک با باز شدن مدار آن افزایش یابد و جرقه برس ها را افزایش دهد. این جرقه حداکثر سرعت دستگاه را محدود می کند ، زیرا جرقه بیش از حد سریع بیش از حد گرم می شود ، فرسایش می یابد و یا حتی کموتاتور را ذوب می کند. چگالی جریان در واحد سطح برس ها ، در ترکیب با مقاومت آنها ، خروجی موتور را محدود می کند.
ایجاد و شکستن تماس الکتریکی همچنین باعث ایجاد نویز الکتریکی می شود. جرقه RFI تولید می کند. برس ها در نهایت فرسوده می شوند و نیاز به تعویض دارند ، و خود کموتاتور مشمول سایش و نگهداری (در موتورهای بزرگتر) یا تعویض (در موتورهای کوچک) است. مونتاژ کموتاتور روی یک موتور بزرگ یک عنصر پرهزینه است که نیاز به مونتاژ دقیق بسیاری از قطعات دارد.
در موتورهای کوچک ، کموتاتور معمولاً به طور دائم در روتور یکپارچه می شود ، بنابراین تعویض آن معمولاً نیاز به تعویض کل روتور دارد.در حالی که اکثر کموتاتورها استوانه ای هستند ، برخی دیسک های مسطح هستند که از چندین بخش (معمولاً حداقل سه) روی یک عایق نصب شده اند.
برسهای بزرگ برای یک منطقه تماس با برس بزرگتر برای به حداکثر رساندن خروجی موتور مطلوب است ، اما برسهای کوچک برای جرم کم مطلوب است تا بتواند سرعت موتور را بدون حداکثر تکان خوردن و جرقه زدن برسها حداکثر کند. (برس های کوچک نیز با هزینه کمتری مطلوب هستند.) همچنین می توان از فنرهای برس محکم تری برای ایجاد برس های یک جرم معین با سرعت بیشتر استفاده کرد ، اما به قیمت از دست دادن اصطکاک بیشتر (بازده کمتر) و تسریع فرسایش برس و کموتاتور. بنابراین ، طراحی برس موتور DC مستلزم ایجاد توازن بین توان خروجی ، سرعت و کارایی/سایش است.
ماشینهای DC به شرح زیر تعریف می شوند:
مدار آرماتور – سیم پیچی که در آن جریان بار حمل می شود ، به گونه ای که می تواند بخش ثابت یا چرخشی موتور یا ژنراتور باشد.
مدار میدان – مجموعه ای از سیم پیچ ها که میدان مغناطیسی تولید می کنند تا القای الکترومغناطیسی در ماشین های الکتریکی انجام شود.
جابجایی: یک تکنیک مکانیکی است که در آن می توان به اصلاح یا دستیابی به DC در ماشین های DC دست یافت.
پنج نوع موتور DC برس دار وجود دارد:
موتور شنت زخمی DC
موتور DC زخمی سری
موتور ترکیبی DC (دو پیکربندی):
ترکیب تجمعی
متفاوت ترکیب شده است
موتور PM DC (نشان داده نمی شود)
جداگانه هیجان زده (نشان داده نشده است).
موتور DC آهنربایی دائمی:
یک موتور PM (آهنربای دائمی) دارای سیم پیچ روی قاب استاتور نیست ، در عوض با تکیه بر PM ها ، میدان مغناطیسی را که میدان روتور در برابر آن برهم کنش ایجاد می کند ، تولید می کند. سیم پیچ های سری با آرماتور ممکن است در موتورهای بزرگ برای بهبود جابجایی تحت بار استفاده شود. از آنجا که این قسمت ثابت است ، نمی توان آن را برای کنترل سرعت تنظیم کرد. زمینه های PM (استاتور) در موتورهای مینیاتوری مناسب هستند تا مصرف برق سیم پیچ میدان را حذف کنند. بیشتر موتورهای DC بزرگتر از نوع “دینامو” هستند که دارای سیم پیچ استاتور هستند. از لحاظ تاریخی ، PMs نمی تواند باعث حفظ شار بالا در صورت جدا شدن آنها شود. سیم پیچ های میدان برای به دست آوردن مقدار مورد نیاز شار کاربردی تر بودند. با این حال ، PM های بزرگ پرهزینه هستند ، همچنین مونتاژ آنها خطرناک و دشوار است. این زمینه را برای ماشین های بزرگ ترجیح می دهد.
برای به حداقل رساندن وزن و اندازه کلی ، موتورهای مینیاتوری PM ممکن است از آهنرباهای با انرژی بالا ساخته شده با نئودیمیوم یا سایر عناصر استراتژیک استفاده کنند. بیشتر آنها آلیاژ نئودیمیوم-آهن-بور هستند. با چگالی شار بالاتر ، ماشینهای الکتریکی با PM های پرانرژی حداقل با همه ماشینهای الکتریکی همزمان و القایی که تغذیه آنها به تنهایی طراحی شده است ، رقابتی هستند. موتورهای مینیاتوری شبیه به ساختار موجود در تصویر هستند ، با این تفاوت که آنها حداقل دارای سه قطب روتور هستند (برای اطمینان از شروع کار ، صرف نظر از موقعیت روتور) و محفظه بیرونی آنها یک لوله فولادی است که به صورت مغناطیسی نمای خارجی آهنرباهای میدان منحنی را متصل می کند.
موتور کموتاتور الکترونیکی (EC)
برخی از مشکلات موتور DC برس دار در طراحی BLDC برطرف شده است. در این موتور ، “سوئیچ دوار” مکانیکی یا کموتاتور با یک سوئیچ الکترونیکی خارجی هماهنگ با موقعیت روتور جایگزین می شود. موتورهای BLDC معمولاً ۸۵-۹۰ efficient کارآمد یا بیشتر هستند. کارایی موتور BLDC تا ۹۶٫۵٪ گزارش شده است ، در حالی که موتورهای DC با برس برس معمولاً ۷۵-۸۰٪ کارآمد هستند.
شکل موج مشخصه موتور BLDC ذوزنقه ای با نیروی الکترومغناطیسی (CEMF) تا حدی از توزیع یکنواخت سیم پیچ های استاتور و تا حدی از محل قرارگیری آهنرباهای دائمی روتور ناشی می شود. سیم پیچ های استاتور موتورهای BLDC ذوزنقه ای که به عنوان موتورهای DC کم و زیاد شده به صورت الکترونیکی نیز شناخته می شوند ، می توانند تک فاز ، دو فاز یا سه فاز باشند و از سنسورهای جلوه ای که روی سیم پیچ های آنها نصب شده اند برای تشخیص موقعیت روتور و بسته شدن کم هزینه استفاده کنند. کنترل حلقه ای از کموتاتور الکترونیکی.
موتورهای BLDC معمولاً در مواردی که کنترل دقیق سرعت لازم است استفاده می شوند ، مانند درایوهای دیسک کامپیوتر یا دستگاه های ضبط کاست ویدئو ، دوک های موجود در درایوهای CD ، CD-ROM (و غیره) و مکانیزم های موجود در محصولات اداری ، مانند فن ها ، چاپگرهای لیزری و دستگاه های فتوکپی آنها چندین مزیت نسبت به موتورهای معمولی دارند:
در مقایسه با طرفداران AC که از موتورهای قطب سایه استفاده می کنند ، بسیار کارآمد هستند و بسیار سردتر از موتورهای معادل AC کار می کنند. این عملکرد سرد منجر به بهبود عمر بلبرینگ فن می شود.
عمر موتور BLDC در مقایسه با موتور DC با استفاده از برس و کموتاتور بدون فرسودگی کموتاتور می تواند به طور قابل توجهی طولانی تر باشد. رفت و آمد همچنین باعث ایجاد نویز الکتریکی و RF زیادی می شود. بدون جابجایی یا برس ، موتور BLDC ممکن است در دستگاههای حساس به برق مانند تجهیزات صوتی یا رایانه استفاده شود.
همان حسگرهای اثر هال که تعویض را انجام می دهند ، همچنین می توانند یک سیگنال سرعت سنج مناسب برای برنامه های کنترل حلقه بسته (کنترل سروو) را ارائه دهند. در فن ها ، از سیگنال سرعت سنج می توان برای بدست آوردن سیگنال “فن OK” و همچنین ارائه بازخورد سرعت در حال اجرا استفاده کرد.
موتور را می توان به راحتی با یک ساعت داخلی یا خارجی هماهنگ کرد و منجر به کنترل دقیق سرعت شد.
موتورهای BLDC برخلاف موتورهای برس دار هیچ شانسی برای جرقه زدن ندارند و آنها را برای محیط هایی با مواد شیمیایی فرار و سوخت مناسب تر می کند. همچنین ، جرقه زدن ازن تولید می کند ، که می تواند در ساختمانهای با تهویه ضعیف تجمع کرده و سلامت ساکنین را به خطر اندازد.
موتورهای BLDC معمولاً در تجهیزات کوچک مانند رایانه استفاده می شوند و عموماً در فن ها برای رهایی از گرمای ناخواسته استفاده می شوند.
آنها همچنین از نظر صوتی موتورهای بسیار بی صدا هستند ، که در صورت استفاده در تجهیزاتی که تحت تأثیر ارتعاشات قرار می گیرند ، مزیت محسوب می شود.
موتور Universal AC/DC:
موتورهای برقی تحریک شده یا موتورهای موازی به عنوان موتور Universal نامیده می شوند زیرا می توانند طوری طراحی شوند که با برق AC یا DC کار کنند. یک موتور Universal می تواند به خوبی بر روی AC کار کند زیرا جریان هم در میدان و هم در سیم پیچ های آرمیچر (و در نتیجه میدان مغناطیسی ناشی از آن) به صورت همزمان (قطبیت معکوس) تغییر می کند و از این رو نیروی مکانیکی حاصله در جهت ثابت چرخش رخ می دهد. .
موتورهای معمولی که در فرکانس های معمولی خط برق کار می کنند ، اغلب در محدوده ای کمتر از ۱۰۰۰ وات یافت می شوند. موتورهای یونیورسال همچنین اساس موتور کششی راه آهن سنتی در راه آهن برقی را تشکیل دادند. در این برنامه ، استفاده از AC برای تغذیه موتوری که در ابتدا برای کار روی DC طراحی شده بود ، به دلیل گرمایش گردابی اجزای مغناطیسی آنها ، به ویژه قطعات قطب میدان موتور که برای DC ، از جامد استفاده می کردند ، منجر به کاهش بازده می شود. آهن بدون روکش) و اکنون به ندرت مورد استفاده قرار می گیرد.
مزیت موتور Universal این است که از منابع AC می توان در موتورهایی استفاده کرد که دارای ویژگی های متداول تری در موتورهای DC هستند ، مخصوصاً گشتاور شروع بالا و طراحی بسیار جمع و جور در صورت استفاده از سرعت های بالا. جنبه منفی مشکلات نگهداری و عمر کوتاه ناشی از کموتاتور است. چنین موتورهایی در دستگاه هایی مانند میکسر غذا و ابزارهای برقی استفاده می شوند که فقط به صورت متناوب استفاده می شوند و اغلب دارای گشتاور شروع بالا هستند. ضربه های متعدد بر روی کویل میدان کنترل سرعت (غیر دقیق) را فراهم می کند. مخلوط کن های خانگی که سرعتهای زیادی را تبلیغ می کنند ، اغلب یک سیم پیچ میدان را با چند ضربه و یک دیود که می تواند به صورت سری با موتور قرار گیرد ، ترکیب می کنند (باعث می شود موتور با AC اصلاح شده با موج نیمه موج کار کند). موتورهای یونیورسال نیز خود را برای کنترل سرعت الکترونیکی مناسب می دانند و به همین دلیل ، انتخابی ایده آل برای دستگاه هایی مانند ماشین لباسشویی داخلی است. از موتور می توان برای چرخاندن درام (چه به جلو و چه معکوس) با تغییر سیم پیچ میدان نسبت به آرماتور استفاده کرد.
در حالی که SCIM ها نمی توانند شفت را سریعتر از حد مجاز فرکانس خط برق بچرخانند ، موتورهای جهانی می توانند با سرعت بسیار بیشتری کار کنند. این امر آنها را برای وسایلی مانند مخلوط کن ، جاروبرقی و سشوار که در آنها سرعت بالا و وزن کم مطلوب است مفید می سازد. آنها همچنین معمولاً در ابزارهای برقی قابل حمل مانند مته ، سندرز ، اره های گرد و اره مویی استفاده می شوند ، جایی که ویژگی های موتور به خوبی کار می کنند. بسیاری از موتورهای جاروبرقی و ماشین اصلاح علف های هرز از ۱۰۰۰۰ دور در دقیقه می گذرند ، در حالی که بسیاری از سنگ شکن های مینیاتوری مشابه از ۳۰٫۰۰۰ دور در دقیقه بیشتر می شوند.
…
دستگاه AC تغییر یافته خارجی:
طراحی موتورهای القایی AC و سنکرون برای عملکرد بر روی موج تک فاز یا چند فازی شکل موج سینوسی یا شبه سینوسی مانند برای کاربردهای سرعت ثابت از شبکه برق AC یا برای کاربردهای سرعت متغیر از کنترلرهای VFD بهینه شده است. یک موتور AC دارای دو قسمت است: یک استاتور ثابت دارای سیم پیچ های مجهز به AC برای تولید میدان مغناطیسی دوار و یک روتور متصل به شفت خروجی که توسط میدان چرخش گشتاور به آن داده می شود.
تعقیب
… [Trackback]
[…] Information to that Topic: vacuumpumps.ir/دانشنامه/ابزارآلات-صنعتی/الکتروموتورها […]
… [Trackback]
[…] Here you can find 37767 additional Info to that Topic: vacuumpumps.ir/دانشنامه/ابزارآلات-صنعتی/الکتروموتورها […]
… [Trackback]
[…] Here you can find 41053 additional Information to that Topic: vacuumpumps.ir/دانشنامه/ابزارآلات-صنعتی/الکتروموتورها […]
… [Trackback]
[…] Find More Information here to that Topic: vacuumpumps.ir/دانشنامه/ابزارآلات-صنعتی/الکتروموتورها […]
… [Trackback]
[…] Find More here to that Topic: vacuumpumps.ir/دانشنامه/ابزارآلات-صنعتی/الکتروموتورها […]
… [Trackback]
[…] There you can find 29624 additional Info to that Topic: vacuumpumps.ir/دانشنامه/ابزارآلات-صنعتی/الکتروموتورها […]
… [Trackback]
[…] Here you can find 98591 more Information to that Topic: vacuumpumps.ir/دانشنامه/ابزارآلات-صنعتی/الکتروموتورها […]
… [Trackback]
[…] Find More here to that Topic: vacuumpumps.ir/دانشنامه/ابزارآلات-صنعتی/الکتروموتورها […]
… [Trackback]
[…] Find More to that Topic: vacuumpumps.ir/دانشنامه/ابزارآلات-صنعتی/الکتروموتورها […]
… [Trackback]
[…] Information to that Topic: vacuumpumps.ir/دانشنامه/ابزارآلات-صنعتی/الکتروموتورها […]
… [Trackback]
[…] Find More Information here to that Topic: vacuumpumps.ir/دانشنامه/ابزارآلات-صنعتی/الکتروموتورها […]
… [Trackback]
[…] Info on that Topic: vacuumpumps.ir/دانشنامه/ابزارآلات-صنعتی/الکتروموتورها […]
… [Trackback]
[…] Info to that Topic: vacuumpumps.ir/دانشنامه/ابزارآلات-صنعتی/الکتروموتورها […]
… [Trackback]
[…] There you can find 44659 additional Info to that Topic: vacuumpumps.ir/دانشنامه/ابزارآلات-صنعتی/الکتروموتورها […]
… [Trackback]
[…] Read More Info here to that Topic: vacuumpumps.ir/دانشنامه/ابزارآلات-صنعتی/الکتروموتورها […]
… [Trackback]
[…] Read More Info here on that Topic: vacuumpumps.ir/دانشنامه/ابزارآلات-صنعتی/الکتروموتورها […]
… [Trackback]
[…] Read More Information here on that Topic: vacuumpumps.ir/دانشنامه/ابزارآلات-صنعتی/الکتروموتورها […]
… [Trackback]
[…] Find More here to that Topic: vacuumpumps.ir/دانشنامه/ابزارآلات-صنعتی/الکتروموتورها […]
… [Trackback]
[…] Informations on that Topic: vacuumpumps.ir/دانشنامه/ابزارآلات-صنعتی/الکتروموتورها […]
دیدگاه خود را ثبت کنید
تمایل دارید در گفتگوها شرکت کنید؟در گفتگو ها شرکت کنید.